無人航空機の衝突回避に関する日本発提案が国際規格の改定版に採択・発行
―グローバルでの情報共有や技術開発、社会実装の加速が期待―
NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)
株式会社SUBARU
日本無線株式会社
株式会社ACSL
NEDOの「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」での成果を基に、 (株)SUBARU、日本無線(株)、(株)ACSLが2021年から進めてきた、無人航空機の衝突回避に関する運航手順を含めた国際規格の改定版が、2023年10月2日に、国際標準化機構(ISO)より「ISO21384-3 Unmanned aircraft systems―Part3: Operational procedures」(無人航空機システム―第3部 運航手順)として正式に採択・発行されました。
本規格改定は、日本発の提案として取り組んできたもので、国際調整などを経て、このたび国際規格に盛り込まれ発行に至りました。
今後、ドローンに関わるステークホルダーが、個別に進めてきた無人航空機の衝突回避技術の開発や運用実証、事業化検討などを本規格に基づいて行うことで、グローバルでの情報共有や技術開発、社会実装の加速が期待できます。
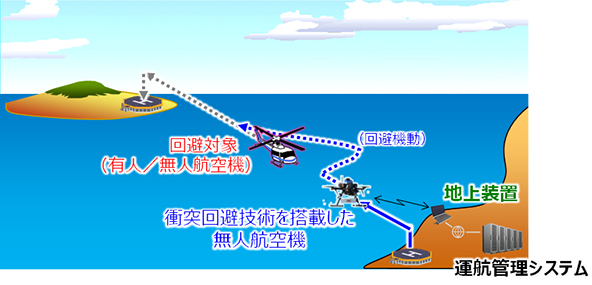 |
| 図1 開発した衝突回避技術のイメージ |
1.概要
一般にドローンと呼ばれる小型の無人航空機や一回り大きい中型の無人航空機は、既に農業分野などで利用が広がっており、さらには災害時の物資運搬や遭難者捜索、物流インフラなどの用途で大いに期待されています。
一方で、無人航空機とドクターヘリなど有人航空機とのニアミス実例※1が国内で報告されるなど、他の航空機との衝突をどのように回避するかが無人航空機の安全利用における喫緊の課題です。また、無人航空機の社会実装に向けて「目視外飛行※2」および「第三者上空飛行※3」を実現する上でも、衝突回避は欠かせない技術です。
無人航空機の衝突回避に関する技術開発は、これまでも各国で行われてきましたが、衝突回避の手順や手段は国際的に統一されていないため、特定のメーカーの機体同士や限定されたサービスの中だけでしか回避できず、空の安全が十分に確保できない可能性がありました。
このような背景の下、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)の「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト※4」の衝突回避技術の研究開発成果を基に、株式会社SUBARU、日本無線株式会社、株式会社ACSLが2021年より進めてきた、無人航空機の衝突回避に関する運航手順を含めた国際規格の改定版が、「ISO21384-3 Unmanned aircraft systems―Part3: Operational procedures」(無人航空機システム―第3部 運航手順)として、2023年10月2日にISOより正式に採択・発行されました。本規格改定は、日本発の提案として取り組んできたもので、国際調整などを経て、このたび国際規格に盛り込まれ、発行に至りました。
今回、無人航空機と他の航空機、あるいは無人航空機同士の衝突回避手順を国際規格化することで、技術開発の方向性を統一することが可能になるとともに、社会実装に向けた各国の取り組みが加速し、幅広いサービスの実現につながることが期待できます。
なお、経済産業省でも本件に関するプレスリリースを公開しています。
無人航空機の衝突回避に関する国際規格が発行されました。
https://www.meti.go.jp/press/2023/10/20231006002/20231006002.html
2.規格改定の内容
2019年11月に初版が発行された「ISO21384-3」は、無人航空機の運航手順を規格化したものでしたが、初版では他の航空機や無人航空機同士の衝突回避手順は規定されていませんでした。
今回の改定で、衝突回避のCONOPS(Concept of Operations:運用構想)を新たな章として追加し、「対象物の探知」、「ターゲットの認識」、「回避機動」、「回避結果の確認」、「元ルートへの復帰」および「元ルートでの飛行」の6ステップからなる基本的な手順を規定しました(図2)。今後、無人航空機は、この6ステップに従い、統一された回避行動をとることが国際規格となります。
<各社の役割>
(株)SUBARU:衝突回避システムの飛行実証およびCONOPS(運用構想)に関する規格案作成
日本無線(株):衝突回避システムの評価試験と飛行実証
(株)ACSL:衝突回避システムの機体実装と飛行実証
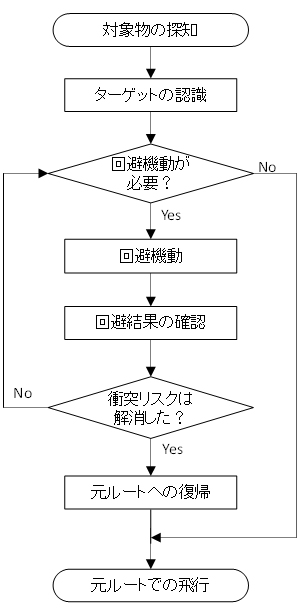 |
| 図2 衝突回避の基本手順 |
3.今後の予定
世界各国のドローンに関わるステークホルダーが、個別に進めてきた無人航空機の衝突回避技術の開発や運用実証、事業化検討などが本規格に基づいて行うことで、グローバルで情報共有や技術開発、社会実装に向けた取り組みの加速が期待できます。
さらに、衝突回避手順の技術運用の標準化を受け、回避に必要な手段として、他の航空機を探知し回避するシステムや、試験方法の標準化が進められ、さらなる空の安全確保が期待できます。
【注釈】
「航空機と無人航空機、無人航空機同士の衝突回避策等について(国土交通省航空局、2016年11月8日)」のp.16を参照しています。
https://www.mlit.go.jp/common/001153086.pdf
無人航空機の操縦者が自分の目によって無人航空機の位置や姿勢および航行の安全性を確認できない飛行のことをいいます。長距離の物流やインフラ点検には必須ですが、実現には操縦者の目視に代わる安全措置の実施や、衝突回避技術の実装などが必要になります。
無人航空機の運航に関与しない第三者の上空を飛行することです。市街地などで物流を実施する場合などに必須ですが、実現には、高い安全性や信頼性を確立する技術が必要になります。
NEDOが2017年より推進する、【1】ロボット・ドローン機体の性能評価基準等の開発、【2】無人航空機の運航管理システム及び衝突回避技術の開発、【3】ロボット・ドローンに関する国際標準化の推進、【4】空飛ぶクルマの先導調査研究の4項目により、省エネルギー社会の実現を目指したプロジェクトです。
事業概要:https://www.nedo.go.jp/activities/ZZJP2_100080.html
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:森、安生、宮本
TEL:044-520-5241 E-mail:robot-drone[*]nedo.go.jp
(株)SUBARU 広報部 担当:羽田 TEL:03-6447-8000
日本無線(株) 経営企画部 担当:廣瀬、一杉 TEL:03-6832-0721
(株)ACSL ※担当:廣嶼(ひろしま) TEL:03-6661-3870
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:坂本(信)、瀧川、黒川、根本、山脇
TEL:044-520-5151 E-mail:nedo_press[*]ml.nedo.go.jp
E-mailは上記アドレスの[*]を@に変えて使用してください。
※新聞、TVなどで弊機構の名称をご紹介いただく際は、“NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)”または“NEDO”のご使用をお願いいたします。

