平成11年5月13日
| 富士重工業 |
| ステレオ画像認識を用いたドライバー支援システム |
| 「ADA(アクティブ・ドライビング・アシスト)」を開発・実用化 |
富士重工業(社長:田中 毅)は、ステレオ画像認識に基づいて車両進行方向の道路環境を把握し、ドライバーに対する安全のための情報提供や、車両制御を自動的におこなうドライバー支援システム「ADA(エイ・ディー・エイ)」の開発を進めてきたが、この度、世界で初めてその実用化に成功し、今年度中にもスバルレガシィシリーズのランカスターに搭載をする計画である。
「ADA」は、2基のCCDカメラから得た、大量の動画像データーを高速処理することにより、前方の車線と複数の物体を同時に3次元認識し、ドライバーに必要な警報や、車両の制御を行うことを可能にするシステムである。本システムは主に1.車間距離警報、2.車線逸脱警報、3.車間距離制御クルーズコントロール、4.カーブ警報/制御の機能を有し、ドライバーのわき見運転や居眠り運転等により、車両が不安全状態に陥ることを回避支援するものである。尚、ステレオ画像認識を用いた障害物の認識技術は物体の各種反射特性の影響を受けにくく、同一システムを備えた他車との干渉も無く、広角の視界領域をカバーできるなどの特長を有している。
これまでクルマの安全性に関してスバルが貫いてきた基本的思想は「トータル安全」である。これは「アクティブセイフティ」と「パッシブセイフティ」に大別されるが、同社では双方を高い次元でバランスすることを目標に、技術開発を進めている。「アクティブ」面では、人間工学と厳しい社内基準に基づく前・後方視界の確保といった基本設計から、登録乗用車系では水平対向エンジンをベースとし、独自のパワートレーンをもつ「4WD」で“走り”、トータル・トラクションコントロールを可能にする「VDC」で“曲がり”、高精度「ABS」で“止まる”といったクルマ本来の基本・運動性能を追求することにより、高い危険回避能力を実現している。また、「パッシブ」面では、スバル独自の「全方位安全」思想に基づく「新環状力骨構造」をベースに、各種デバイスを駆使し、実際の事故によって異なる衝突形態に、最適に対応し得る車体構造としている。
今回の「ADA」は、特に「アクティブ」セイフティ面で、ドライバーの認識・判断能力を補うべく、前方道路情報を車両側が取り入れたシステムであり、同社の安全性に対する基本的思想「トータル安全」を、さらに進化・具現化する技術として位置づけている。
尚、本システムは各学会、論文、モーターショー等で、その基本技術を公開し注目を集めてきたが、今回実用化仕様をレガシィ・ランカスターに搭載し、5月19日より公開される“人とくるまのテクノロジー展 '99 ”(主催:社団法人 自動車技術会 於:パシフィコ横浜)に出展する予定である。
| ADA:Active Driving Assist |
| VDC:Vehicle Dynamics Control |
| ABS:Antilock Brake System |
1. |
要 旨 | |||||||||||||||||||
現在、ITSによる安全かつ快適なクルマ社会実現の一環として、運転者支援システムの研究が急速に進められている。例えば車間距離警報や車間距離制御、路外逸脱警報、カーブ車速制御、さらには自動駐車、自動運転システムなどが提案、開発、実用化されつつある。 これらのシステムを実現するために最も重要な技術は車両周囲の状況を的確に認識する周囲状況認識技術である。周囲状況を認識するということは、単純に物体までの距離と方向を求めるだけでなく、車線などの道路領域の検出、複数の物体の検出、そしてそれらの位置や相対速度から車両との衝突の可能性を予測するといった高度な機能まで要求される。富士重工業ではこのような目的に最も適しているのはステレオ画像認識技術と考え、本技術を用いた周囲状況認識装置を開発してきた。 「ADA」はこのステレオ画像認識装置を中核とした、ドライバー支援システムであり、人間の両眼に相当する2台の高感度CCDカメラを介して得られた2つの影像を比較解析し、周囲状況を認識するとともに、ナビゲーションシステムから提供される各種道路情報、VDCなどから入力される車両走行状態情報を合わせ、総合的に車両の進行方向の環境を判断し、必要に応じドライバーに対する警報や、車両に対する制御を自動的に行うものである。 | ||||||||||||||||||||
| ITS:Intelligent Transport Systems(高度道路交通システム) | ||||||||||||||||||||
2. |
機能の概要 | |||||||||||||||||||
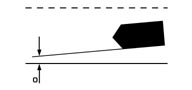
「ADA」は主に下表に示す4つの機能を有する。
| ||||||||||||||||||||
3. |
システム構成(図1、2) | |||||||||||||||||||
| ||||||||||||||||||||
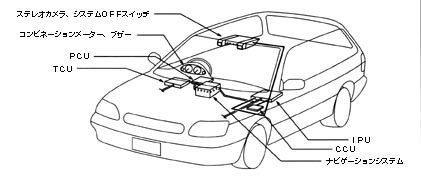 図1 システム配置 | ||||||||||||||||||||
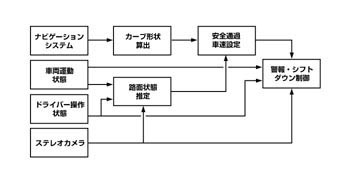
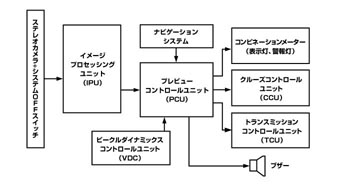 図2 システムブロック図 | ||||||||||||||||||||
4. |
作動原理 | |||||||||||||||||||
| ||||||||||||||||||||
5. |
マン・マシンインターフェース(図5) | |||||||||||||||||||
| 参考として、本システムが搭載された車両の各種表示灯、警報灯の設置例を下図に示す。 | ||||||||||||||||||||
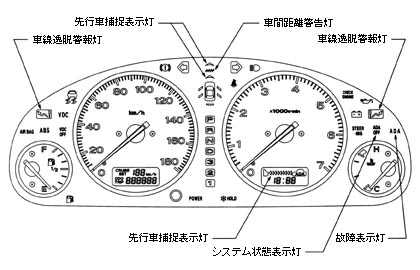 図5 ADA搭載車のコンビネーションメーター例 | ||||||||||||||||||||
![]()