
2001年9月18日
| 富士重工業 研究用小型移動ロボットを開発 |
富士重工業(竹中 恭二社長)は、複数のロボット間における協調制御や障害物を回避しながらの自律走行などが可能で、知能ロボットの研究に適した卓上小型移動ロボットを開発した。同社では、このロボットを用いて、協調制御や学習による制御の法則の生成、進化手法を適用した知能ロボット研究を行う。また、共同研究を希望する教育・研究機関に対し、ロボットの無償貸与を行ない産学協同の知能ロボット研究を促進する。
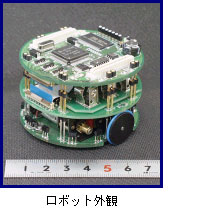
小型移動ロボット(MK-01X)は、直径6.5cm高さ5cm重量約100gと小型・軽量でありながら、フラッシュメモリ内蔵の16bitコンピュータと大容量の拡張RAM、進行方向を検出するジャイロセンサ、周囲の障害物を検知する赤外線センサを搭載し、研究者が作成した知能化プログラムの実行を含め、様々な制御方式の研究・実験を可能としている。例えば、これまでコンピュータ上のシミュレーションで行われてきた「互いに協調した行動」や「競合状態を避ける行動」といった協調制御についても、同一の実験環境に複数のロボットを配置し実機で検証することができるため、実際の環境での制御の適応性などの評価を容易に行うことも可能である。
また、本体には拡張コネクタを装備し、今後、無線通信機能、ロボットビジョン機能を備えたオプション基板の開発を予定している。また、研究内容に応じた改変および機能拡張を容易にするため、使用されている部品および回路については、同社のホームページなどを通じて全てを公開する。
小型移動ロボットは、富士重工業において社内横断的に先行開発や基礎技術の研究を行なっている技術研究所によって開発された。今後、このロボットを用いた産学共同の知能化技術研究を進め、同社の製品に対し研究成果の積極的な適用を行っていく。
なお、このロボットは、「第19回日本ロボット学会学術講演会(9月18日~20日、東京大学本郷キャンパス)」に出展され、デモンストレーションを行う予定。
| CPU | H8/3048F1(予定) |
| メモリ | 内蔵Flash 512kByte 内蔵RAM 8kByte 外付SRAM 512kByte |
| センサ | 反射式赤外センサ × 8ch モータエンコーダ 18pulse/rev ジャイロセンサ |
| 電源 | 電池(単4×3)または 外部電源(3.6~12.0V) |
| 寸法 | 直径 6.5cm 高さ 5.0cm |
| 重量 | 約100g |
富士重工業株式会社 技術研究所 0422-33-7454